Welcome back to what I hope is starting to become part of a weekly routine for some of you. It certainly is for me 🙂 There are some very cool news this week, with the addition of a new retention mechanism, which I’ll explain in more details below.
I am also really excited to see that the popular AZ3166 MXChip IoT DevKit is now supported in Zephyr. It’s a developer kit that people familiar with Microsoft Azure IoT will certainly recognize, and I am looking forward to seeing what people will do with it now that it can be used with Zephyr!
Finally, a big shout-out to this week’s first time contributors: Andreas, Balthazar, Bill, Christian, Daniel, Katherine, Matthew, Sihyun, and Tarun.
New Retention Subsytem
The new retention system provides a robust and efficient way for applications to manage data that must be retained while the device is powered, without having to rely on non-volatile storage (64f4404).
The retention system API enables applications to read and write data to memory areas or devices that retain information while the device is powered. This functionality allows sharing information between different applications, or within a single application without losing state information upon device reboot.
Data Integrity
To ensure the validity of retained data, the retention system offers the option to use a magic header that can be used to verify if the front of the retained data memory section contains a specific value. An optional checksum of the stored data can also be appended to the end of the data, providing further validation.
Retained Data Partitioning
Data stored through the retention system can be partitioned into multiple distinct areas, making it easier to manipulate only the fields you need instead of a large binary blob.
There is extensive documentation about this new feature, so I definitely encourage you to check it out. Thanks Jamie for all the hard work on this!
New boards & shields

- Like I mentioned in the intro, the MXChip AZ3166 IoT DevKit is now supported (ce339e3).
It’s a board that many people familiar with the Microsoft Azure IoT ecosystem will not only recognize, but also likely already have somewhere in a drawer. If that sounds like you, I would definitely like to encourage you to give Zephyr a try, the Getting Started Guide is the best way.
I am working on a short video that should make things even easier for you. Please let me know about your experience in the comments, if you give it a try!
Note: the Wi-Fi module is not supported at this point, but contributions are welcome to propose an integration of the proprietary driver.
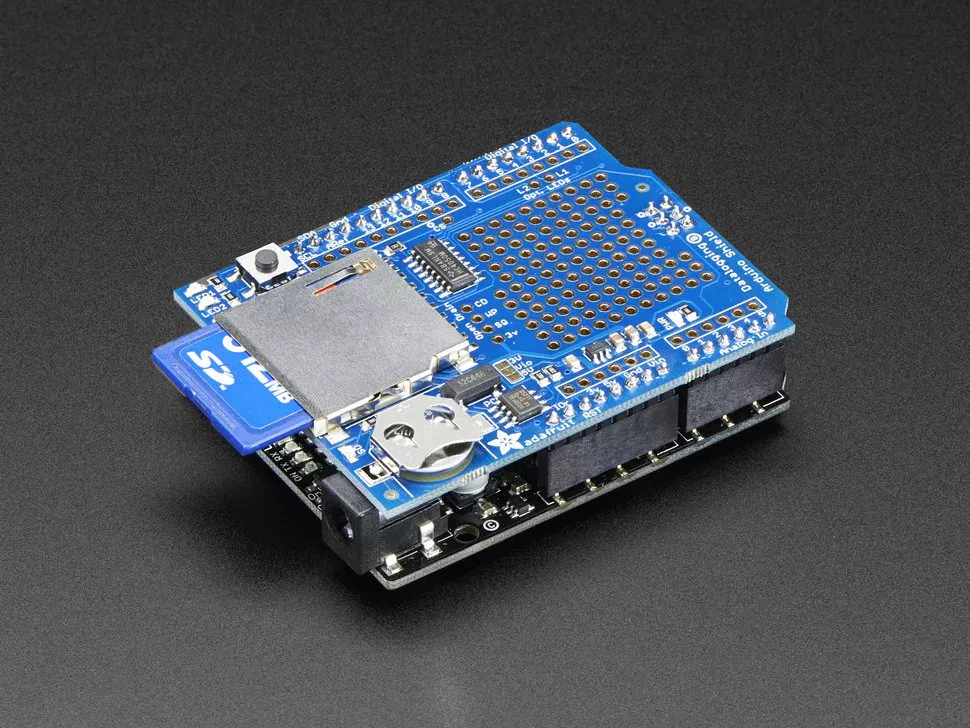
- Adafruit’s Data Logger Shield is now supported (d4d8580). This shield provides an SD card slot and a real-time clock (RTC) for Arduino-compatible boards. The RTC chip it contains is the NXP PCF8523, for which a driver was contributed this week too.
- Incremental ADC support (IADC) support has been added for Silicon Labs EFR32BG27 SoC (0417d38).
- Added support for STM32U595 and STM32U599 with basic peripherals (a0ad7b7).
Bluetooth
PAwR Advertiser and Sync Support
")
The recently released Bluetooth 5.4 specification introduced the notion of Periodic Advertising with Responses (PAwR), a feature that allows Bluetooth Low Energy devices to perform energy-efficient, bi-directional, communication in a large-scale one-to-many topology. A typical application is electronic shelf labels (ESL).
As of this week, it’s now possible to use the PAwR Advertiser and Synchronization features (9021e2f, 95bc5cf). Support for Periodic Advertising Connection Procedure has also been added (PR 56374).
I encourage you to look at the codes samples (one for advertising, one for synchronizing, and the connection procedure too) to get more familiar with the functionality and how to use it in Zephyr.
Drivers
- A new driver for the Raspberry Pi Pico’s Programmable I/O (PIO) has been added (5abb1b1).
PIOs can be used to implement custom peripheral interfaces or offload real-time tasks from the main processor. I like to think of it as a tiny FPGA that you can program using an assembly language, which describes the state machine dictating the behavior of your I/O pin. This, for example, would blink an LED attached to the pin:
.program hello
set pindirs, 1
loop:
set pins, 1 [31]
set pins, 0 [31]
jmp loop
In order to illustrate how to use PIO for more complex/useful scenarios, a sample has been created that shows how to implement UART RX and UART TX pins over PIO. See example here, and driver here.
- The Vishay VEML7700 Ambient Light Sensor is a high accuracy ambient light sensor with an I²C interface (a665fc0). It has 16-bit of dynamic range and can perform ambient light detection from 0 to 120 klx.
- New Incremental ADC (IADC) driver for SiLabs Gecko (0417d38). The incremental architecture uses oversampling to allow applications to trade speed for higher resolution (but it doesn’t look like oversampling is supported in the current implementation of the driver).
- New driver for the NXP PCF8523 Real-Time Clock (RTC) (11fc5d0). The PCF8523 is a CMOS Real-Time Clock (RTC) and calendar optimized for low power consumption.
- New driver for the Motorola MC146818B RTC (bfeb5043ac).
- New Infineon CAT1 ADC driver (3e02d48e4e)
- Texas Instruments INA3221 Current/Voltage Monitor (3746074). The INA3221 can sense current on up to 3 channels in a 0-26V range.
Updates to existing drivers
- The SDHC driver has been updated to support different CPOL/CPHA SPI clock modes (1929eb3). This helps deal with SD Cards that require the clock to switch to low when not active.
- The Semtech SX126x LoRa driver has been updated to support fine-grained Power Amplifier (PA) configuration for the STM32WL series (e78e8d7).
- The hwinfo driver for all ESP32 boards has been updated to implement the
get_reset_causefunction (9eef799).
Miscellaneous Updates
- Added Power Delivery (PD) Source Support to the USB-C Stack (see documentation).
- A new MCUboot shell command (
serial_recovery) has been added. It allows entering MCUboot’s serial recovery mode when the retention subsystem is used. - A new script has been added to generate coverage reports for the Zephyr’s BabbleSim-based tests (ad3c390).
- New
DT_ANY_INST_HAS_PROP_STATUS_OKAYmacro. Given a Devicetree property name, it evaluates to 1 if any enabled instance ofDT_DRV_COMPAThas the property or to zero if it hasn’t. (44ec128e8b) - To make first-time contributors feel welcome and encourage their continued involvement in the Zephyr project, a new GitHub action has been added that sends a greeting message to users when they open their first pull request or issue.
I certainly encourage you to try it out by taking the plunge of doing your first contribution, if you’ve never contributed to the project!
As always please feel free to jump in with your thoughts or questions in the comments below. See you next week!
If you enjoyed this article, don’t forget to subscribe to this blog to be notified of upcoming publications! And of course, you can also always find me on Twitter and Mastodon.
Catch up on all the editions of the Zephyr Weekly Update:

One reply on “Zephyr Weekly Update – I won’t retain you too long!”
Regarding the added features for PAwR (Periodic Advertising with _Responses_): The features are provided by Nordic Semiconductor are related to support in the Bluetooth Host. Nordic is using Zephyr and Zephyr’s Bluetooth Host in the nRF Connect SDK. The default Bluetooth Controller, however, is the SoftDevice Controller which is Nordic proprietary and the controller that currently support PAwR. So if you want to get started with Bluetooth v5.4 features the option for now is nRF Connect SDK, and also what I recommend of course 🙂